Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA
Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA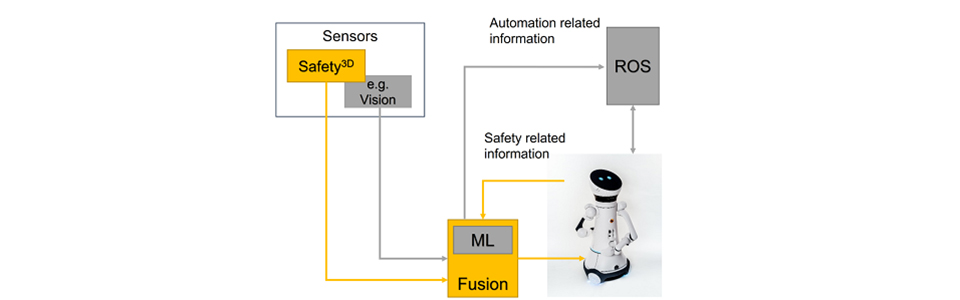
S³ – Sicherheitssensorik für Serviceroboter in der Produktionslogistik und stationären Pflege
In Kürze
In der mobilen Servicerobotik ist Sicherheit ein wichtiges Thema – vor allem, wenn sie mit Menschen interagieren. Ziel des Projekts ist es deshalb, einen Sensor zu entwickeln, mit dem Serviceroboter ihre Umgebung besser erfassen können. Das Fraunhofer IPA unterstützt im Projekt mit der Sensorauswahl, durch die Weiterentwicklung seiner 3D-Erkennungssoftware für Objekte und Personen sowie in Form von praktischen Tests eines mit dem Sensor ausgestatteten mobilen Roboters in einem Pflegeheim.
Im Detail
Mobile Serviceroboter werden vermehrt in öffentlichen Bereichen eingesetzt, in denen sie mit Menschen interagieren und zusammenarbeiten. Im Gegensatz zu Robotern im industriellen Umfeld kommen dabei auch Personen mit den Robotern in Kontakt, die im Umgang mit den Maschinen gänzlich unerfahren sind. Speziell im Gesundheitswesen können Serviceroboter zudem auf geschwächte oder mobilitätseingeschränkte Menschen treffen. Deshalb benötigen die Maschinen eine umfangreiche Sensorik, die Gefahrensituationen erkennt und Gefährdungen vermeiden kann. Ein wichtiger Aspekt, um sichere Aktionen des Roboters planen zu können, ist dabei die Unterscheidung von Personen und Objekten, die sich in seiner Nähe aufhalten.
Um das Projektvorhaben – die Entwicklung einer entsprechenden 3D-Umgebungssensorik zur Erkennung und Unterscheidung von Objekten und Personen – zu erreichen, bringt das Fraunhofer IPA sein technisches Knowhow auf dem Gebiet der Sensorik und Softwareentwicklung ein. So begleiteten die IPA-Forscher zunächst die Anforderungsanalyse, im Rahmen derer verschiedene Einsatzfelder der Roboter analysiert und notwendige Eigenschaften des Sensors abgeleitet wurden. Des Weiteren unterstützten sie die Partner bei der Konzeption des Sensors, da sie beim Thema bildgebende Sensoren umfassendes Expertenwissen haben.
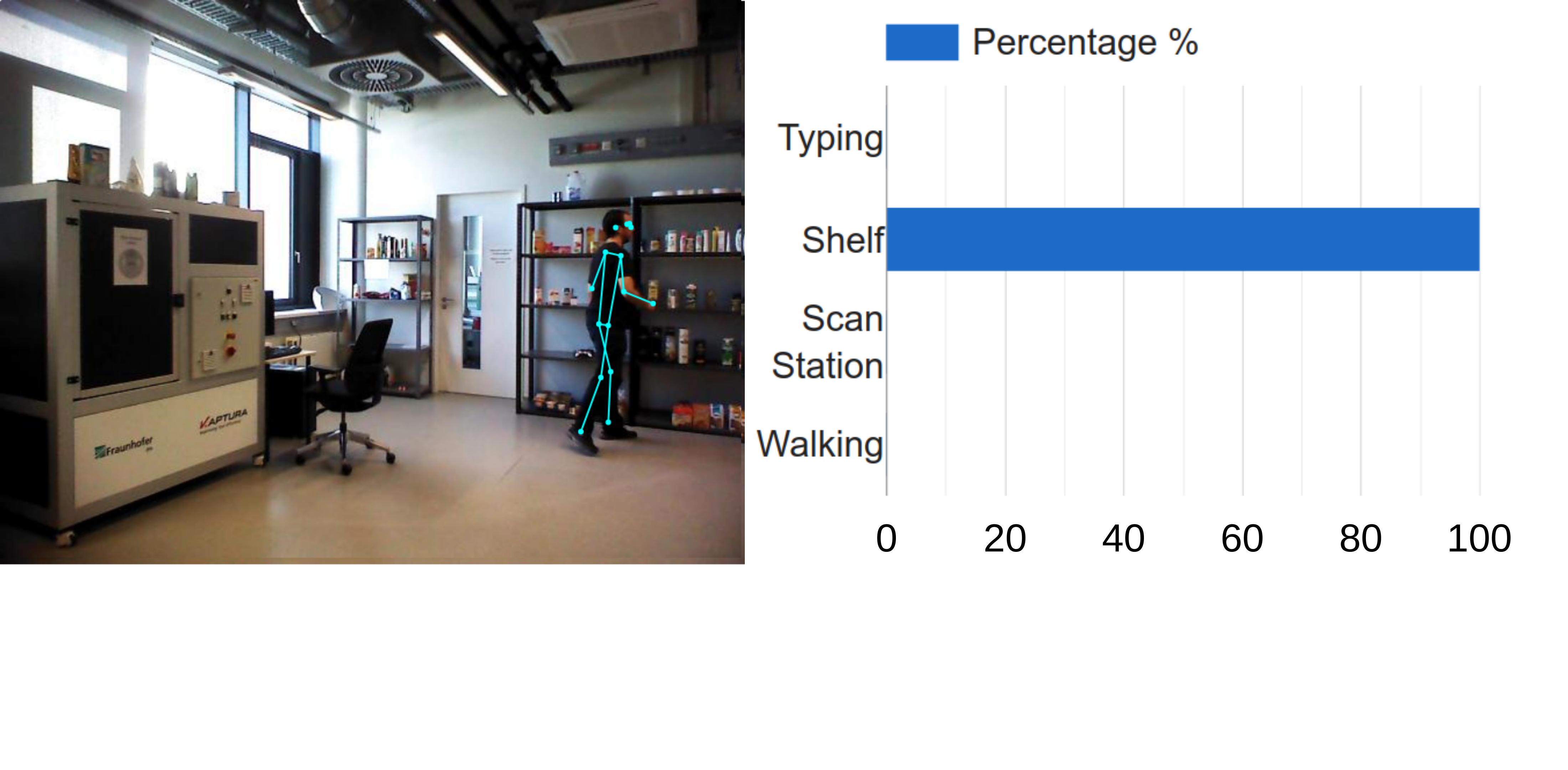
Auch in der Bildverarbeitung für die Robotik realisiert das Fraunhofer IPA seit Jahren erfolgreich Forschungs- und Industrievorhaben. In S³ werden deshalb vorhandene Verfahren zur Objekt-, Personen- sowie Posenerkennung weiterentwickelt. Zudem sollen Methoden der Künstlichen Intelligenz genutzt werden, um Servicerobotern ein Verstehen von Situationen und damit eine darauf abgestimmte Reaktion zu ermöglichen.
Im Rahmen des Projekts werden Anwendungsszenarien aus der Produktionslogistik und der stationären Pflege betrachtet. Die praktischen Tests des Sensors im Pflegekontext finden mithilfe des Assistenzroboters Care-O-bot® 4 statt. Dabei kann das Institut auf seine langjährige Erfahrung in der Zusammenarbeit mit Pflegeeinrichtungen aufbauen.