Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA
Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA
Das Fraunhofer IPA kann Robotersysteme vermessen und deren Genauigkeit mithilfe verschiedener Methoden verbessern.
Das Vermessen eines Robotersystems hilft, es effizienter zu machen und die Qualität der Aufgabenausführung vorherzusagen. Das Vorwissen darüber, was passiert, wenn sich der Anwendungsfall ändert, erlaubt es, Industrieroboter flexibler einzusetzen. Des Weiteren ermöglichen die Messergebnisse Vergleiche zwischen geplanter und abgefahrener Bahn, weshalb bereits hier eine Qualitätsvorhersage gemacht werden kann.
Ziel des Projekts ist es, einen Knickarmroboter zu vermessen und so seine Genauigkeit nach der ISO-Norm 9283 (»Industrieroboter - Leistungskenngrößen und zugehörige Prüfverfahren«) zu steigern. Dazu wählen die IPA-Experten stichprobenartig einen Teil vom Arbeitsraum des Roboters aus und testen diesen. Das Vorgehen entsprechend der Norm ermöglicht ihnen, wiederhol- und belastbare Ergebnisse zu generieren. Daraus können sie gezielte Maßnahmen ableiten, um den Roboter genauer zu machen sowie Vorhersagen treffen, wie sich der Roboter im Anwendungsfall verhalten wird.
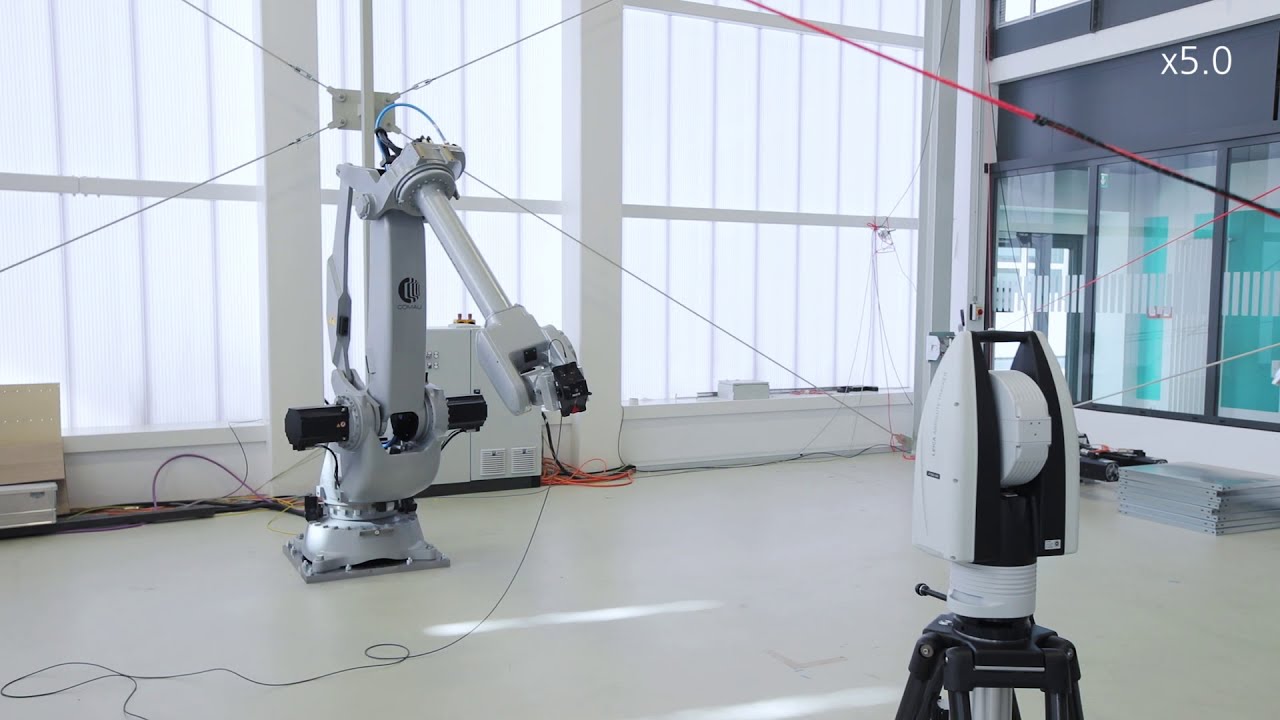
Um die externen Daten des Systems zu erfassen, verwendet das Institut einen Leica Absolute Tracker AT960 in Kombination mit einer Leica T-Mac. Diese Geräte messen mit einer Genauigkeit von +/- 40 µm im gesamten Arbeitsraum. Mithilfe der Tests können Unternehmen Roboter zielgerichtet einsetzen und die Qualität des Systems analysieren. Ändert sich der Anwendungsfall, beispielsweise aufgrund einer anderen Last oder eines anderen Arbeitsraums, weiß das Unternehmen im Vorfeld über die Auswirkungen Bescheid und kann das System somit flexibler nutzen. Zudem besteht die Möglichkeit, Roboter ähnlichen Typs unter verschiedenen Aspekten zu vergleichen und ermöglicht so einen gezielteren Einsatz von Robotern. Der wichtigste Vorteil eines genauen Roboters ist schließlich, dass sich geplante Bahn und Pose einfach und ohne Abweichungen, und damit ohne manuelle Interaktion am realen Roboter umsetzen lassen.
Wichtig zu wissen: Jeder Anwendungsfall stellt unterschiedliche Prozessanforderungen an das Robotersystem. Schweißprozesse verlangen vor allem eine hohe Geschwindigkeits- und Bahngenauigkeit um insgesamt die Prozessqualität zu verbessern. Bei Pick-and-Place-Aufgaben hingegen stehen Absolutgenauigkeit und Bahngeschwindigkeit im Fokus, um möglichst niedrige Taktzeiten mit wenigen Fehlgriffen zu erzielen. Je nach Anwendungsfall und Genauigkeitsanforderungen können die IPA-Experten hierfür angepasste Tests durchführen. In den Forschungsprojekten verändern sie nicht die Mechanik des Roboters, vielmehr steigern sie durch die Anpassung von Prozessparametern, wie Geschwindigkeit und Last, die Performance des Robotersystems.