»Die Positionierung einer Nadel oder Sonde bei einem solchen minimalinvasiven Eingriff ist eine besonders schwierige Aufgabe, denn der Mediziner kann sich am besten mit Hilfe von Computertomographie- oder MRT-Bildern orientieren – und das heißt, dass er arbeiten muss, während der Patient in einer engen Röhre liegt. Da bleibt kaum Beweg-ungsfreiheit«, erklärt Marius Siegfarth von der Projektgruppe für Automatisierung in der Medizin und Biotechnologie (PAMB) des Fraunhofer IPA an der Medizinischen Fakultät Mannheim der Universität Heidelberg.
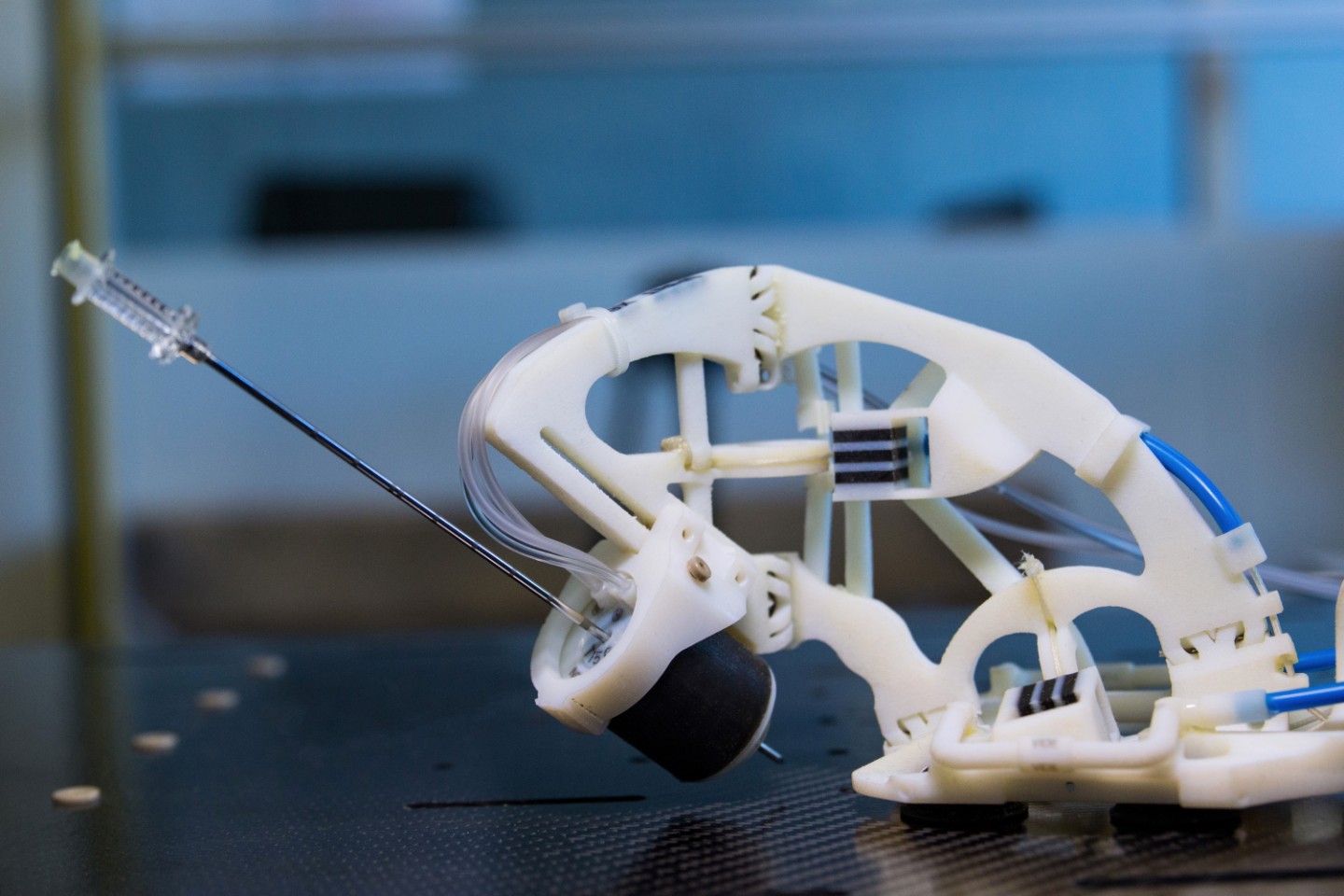
Der Roboter, den sein Team zusammen mit vier weiteren Forschergruppen aus Deutschland, Frankreich und der Schweiz im Projekt SPIRITS entwickelt, ist so klein und leicht, dass er zusammen mit dem Patienten in die Röhre geschoben werden kann. Steuern lässt er sich über eine Hydraulik von außen – der Arzt kann also ein paar Meter entfernt und sogar in einem anderen Raum sitzen, wo er im Falle einer CT-Aufnahme vor Strahlung geschützt ist. Die Abkürzung SPIRITS steht dabei für Smart Printed Interactive Robots for Interventional Therapy and Surgery.
»Die Herausforderung des Projekts lag darin, ein Design zu entwickeln, das sich mit einem PolyJet-Drucker in einem einzigen Schritt fertigen lässt, gleichzeitig aber aus voll funktionsfähigen Komponenten besteht – beispielsweise Drehgelenken mit Hydrau-likaktuatoren und einem Antrieb für den Nadelvorschub. All diese Komponenten haben unterschiedliche Materialeigenschaften«, erläutert Siegfarth.
 Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA
Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA